Autonomous Wall Detection
Preliminary Sensor Tests
Our first goal for milestone 2 was to have our robot autonomously detect walls using the Sharp GP2Y0A41SK0F short-range IR sensors. These IR short-range IR sensors were chosen given the small distance of the walls to the robot. We attached three of these IR sensors to a 3D printed mount attached to the robot in order to detect walls in front, to the left, and to the right to aid in navigation through the maze.
We started off by connecting the IR sensor’s GND, 5V, and analog signal output to the Arduino’s GND, +5V, and analog input respectively.
The IR sensor readout produced an output voltage which is translated to a digital value in range 0:1023 by the Arduino analog read. Our code then uses arithmetic to convert the digital value into a voltage value and finally into distance. Based on the datasheet, in order to calculate a voltage, the following operations must be performed on the sensor readout:
volts = sensorValue*(5.0/1024.0);
distance = 11*(1/volts)-.42; //datasheet graph shows Voltage = slope*(1/distance)- slope calculated to be 11 using best fit line
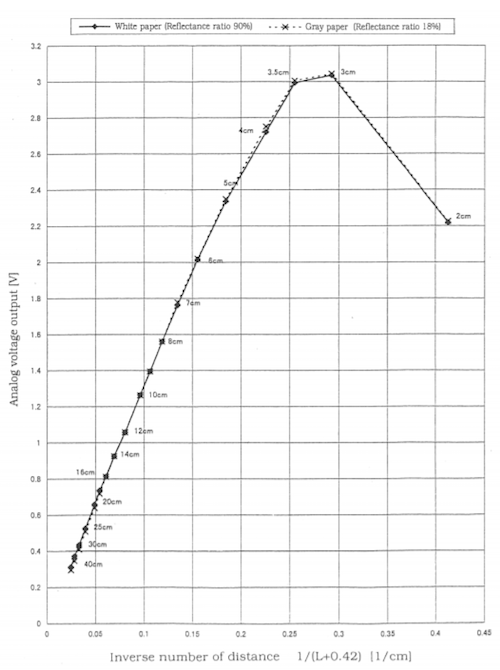
Figure 1. Graphical relationship between analog voltage and distance.
Next, we designed a custom distance sensor holder. Our group intends to place the distance sensors slightly ahead of the robot in order to allow the robot to begin the turn early.
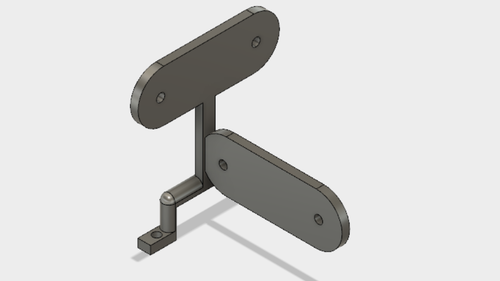
Figure 2. Schematic distance sensor holder.
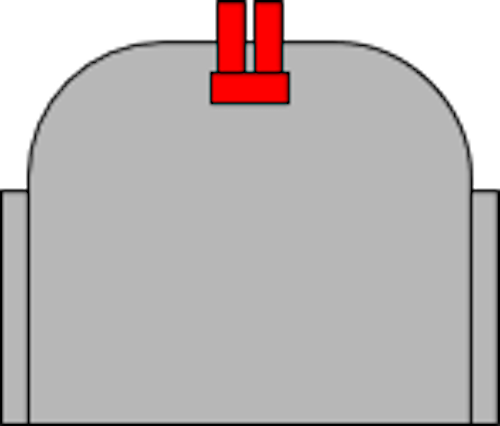
Figure 3. Placement of distance sensors on the robot. Distance sensors are colored red.
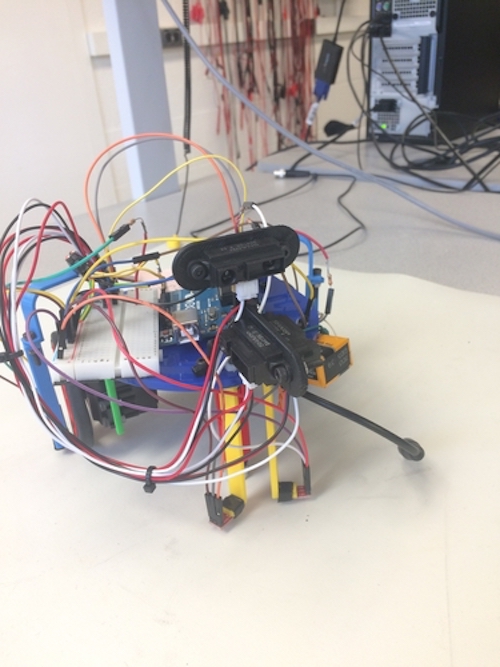
Figure 4. Sensor configuration on the actual robot.
Reading from 3 IR Sensors in Sequence
To poll for the analog output from each of the three IR sensors without interference from the other two, we used the loop function to read from them one at a time.
void loop() {
if(i == 0)
AX = A0;
else if(i ==1)
AX = A1;
else
AX = A2;
// read the input on analog pin X:
sensorValue = analogRead(AX);
Figure 5. Sequentially reading from IR sensors in a repetitive loop
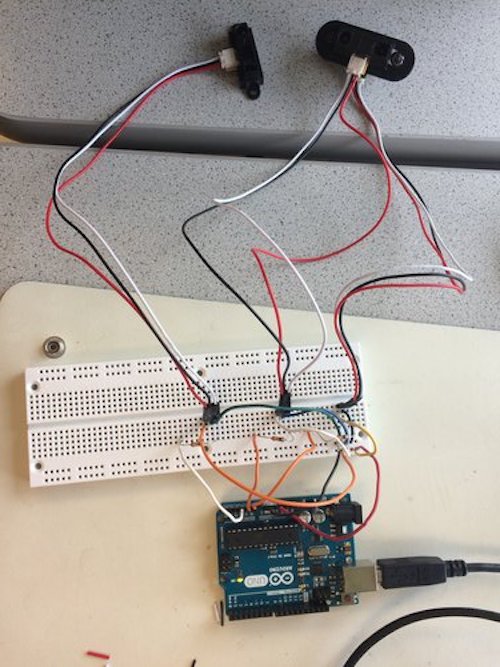
Figure 6. Circuit for reading from 3 IR sensors
After cursory testing, we found that the distance sensors tend to occasionally give erroneous values. As such, we designed an outlier detection code. It takes the average of the previous three values and, if the current value is an outlier, then it disregards the value. If, however, the distance sensors read three outlier values in a row, then the previous distance value array will be reset.
if (i+1 == 1)
{
s1_dist_avg = (s1_vals[0] + s1_vals[1] + s1_vals[2])/3;
if (s1_dist_avg == 0) //If the system was just initialized, then set all array values to be the first measured distance.
{
s1_vals[0] = distance;
s1_vals[1] = distance;
s1_vals[2] = distance;
}
test_dist = distance - s1_dist_avg; //Documentation claims that it putting operations inside abs() will cause errors.
if (abs(test_dist) <= 15)
{
s1_outliers = 0;
s1_vals[s1_index] = distance;
//Debugging print statements:
/*Serial.print(distance);
Serial.print(" has been put into s");
Serial.print(i+1);
Serial.print("_vals[");
Serial.print(s1_index);
Serial.print("].\n");*/
if (distance > 40) //Can be changed based on how far we want to detect walls.
{
Serial.println("No left wall detected!");
}
else
{
Serial.print("Left wall detected at distance ");
Serial.println(distance);
}
if (s1_index < 2)
{
s1_index = s1_index + 1;
}
else
{
s1_index = 0;
}
}
else
{
if (s1_outliers <= 2)
{
/*
Serial.print("[OUTLIER NUMBER ");
Serial.print(s1_outliers);
Serial.println("]");
*/
s1_outliers = s1_outliers + 1;
}
else
{
/*
Serial.print("[3 IN A ROW DETECTED; RESETTING ARRAY WITH ");
Serial.print(distance);
Serial.println("]");
*/
s1_outliers = 0;
s1_vals[0] = distance;
s1_vals[1] = distance;
s1_vals[2] = distance;
s1_index = 0;
}
}
}
Figure 6. Preliminary Outlier documentation code.
To test our code, we attached an LED to our circuit and made it flash a different number of times based on where the walls were detected. If the LED flashes 3 times, then the Arduino detects a wall to the left. If it flashes 2 times, then the Arduino detects a wall to the right. Finally, if there is a wall in front of the Arduino, the LED flashes once.
if (abs(test_dist) <= 15)
{
s1_outliers = 0;
s1_vals[s1_index] = distance;
//Debugging print statements:
/*Serial.print(distance);
Serial.print(" has been put into s");
Serial.print(i+1);
Serial.print("_vals[");
Serial.print(s1_index);
Serial.print("].\n");*/
if (distance > 20)
{
Serial.println("No left wall detected!");
}
else
{
digitalWrite(ledPin, HIGH); // LED blinks thrice when left wall detected
delay(500);
digitalWrite(ledPin, LOW);
delay(500);
digitalWrite(ledPin, HIGH);
delay(500);
digitalWrite(ledPin, LOW);
delay(500);
digitalWrite(ledPin, HIGH);
delay(500);
digitalWrite(ledPin, LOW);
delay(2000);
Serial.print("Left wall detected at distance ");
Serial.println(distance);
}
if (s1_index < 2)
{
s1_index = s1_index + 1;
}
else
{
s1_index = 0;
}
}
Figure 7. Left wall detected LED code. This segment replaces the if(abs(test_dist)<=15) block in Figure 6.
You can see this in action in this video. Pay attention to the LED. It flashes 3 times for left wall detected, 2 times for right wall detected, and 1 time for wall in front detected.
Optics - Software to Read Treasures
To set up and test with the treasures, refer to the Optics Section of Lab 2.
To determine the frequency of the treasure, we used the fft_adc_serial example from the Open Music Library (as described in Lab 2). Since we know from testing, that the maximum bin number for 7 kHz is 47, for 12 kHz is 78 and for 17 kHz is 118, we extracted the maximum FFT amplitude and bin number by looping over the logged data from the library. Here’s a snippet of the code:
//extract and sort fft data to find max amplitude and bin
for (byte i = 2 ; i < FFT_N/2 ; i++) {
if(fft_log_out[i] > max_amp){
max_amp = fft_log_out[i];
max_bin = i;
}
}
Figure 8. Here, max_amp and max_bin’s are of type int. For every 2 bins from a group of 150 (FFT_N/2), if the value at fft_log_out[i] is greater than the current max_amplitude, then we store that value in max_amp and store the index of the loop, i, in max_bin.
Then, we compare our calculated bin values to the actual maximum bin value using logical if-then statements. For each frequency, our range of detection was +/- 1. For example, for 7 kHz, we check if max_bin is greater than or equal to 46 and if it is less than or equal to 48. We do this to estimate our frequency, and to prevent the case in which the maximum bin number is not equal to 47. If the correct bin number is detected, the serial monitor will print the frequency. If no frequency is detected, the serial will print that no treasure is detected.
These are our conditionals:
//7 khz
if((max_bin >= 45) && (max_bin <= 47)){
Serial.println("7 kHz Treasure detected");
}
//12 khz
else if((max_bin >= 79) && (max_bin <= 81)){
Serial.println("12 kHz Treasure detected");
}
//17 khz
else if((max_bin >= 113) && (max_bin <= 115)){
Serial.println("17 kHz Treasure detected");
}
//no treasure
else{
Serial.println("No Treasure detected");
}
Figure 9. Conditional statements to determine the correct treasure frequency as described above.
Testing Treasure Reading
We obtained three treasures, and tuned them to our target frequencies - 7 kHz, 12 kHz, 17 kHz - as described in Lab 2. Then, we wired each treasured to a power source at 3 V. The power source we used had 3 channels so we tested all three treasures at once, but you can also switch the treasures. The setup looked like this:

Figure 10. Treasures tuned to 7 kHz, 12 kHz, 17 kHz, respectively.
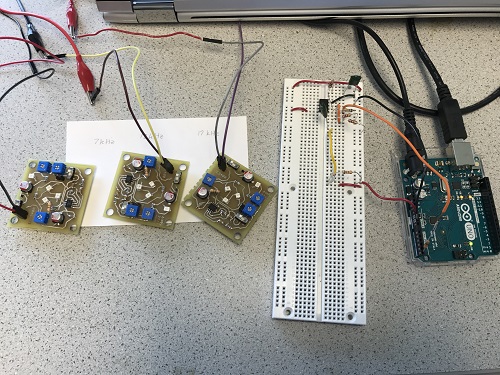
Figure 11. Treasures tuned to 7 kHz, 12 kHz, 17 kHz with sensor.
To confirm that each treasure is detected, we measured FFT peaks with the oscilloscope. The peaks for each treasure should look similar to the following diagrams:
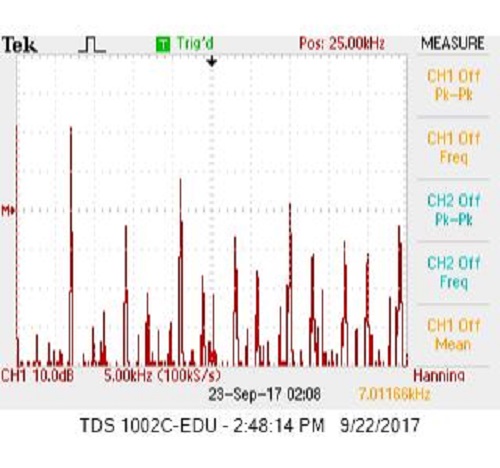
Figure 12. FFT for 7 kHz.
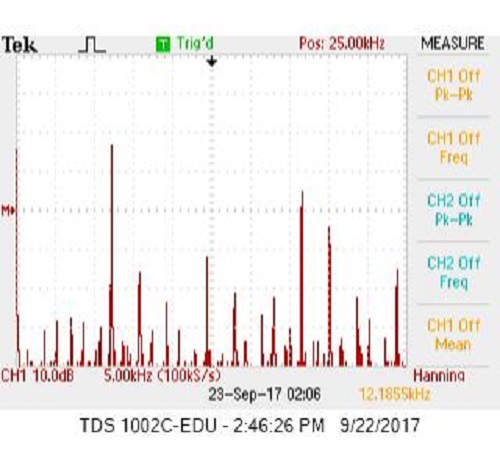
Figure 13. FFT for 12 kHz.
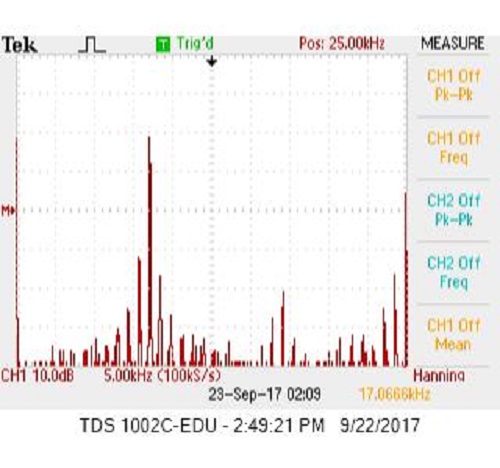
Figure 14. FFT for 15 kHz.
To test if our software itself works, we ran the Arduino serial monitor, and moved each treasure around the sensor. As the treasure was detected, the correct frequency was printed on the monitor. A video of the test can be found here.
The entirety of our code:
/*
fft_adc_serial.pde
guest openmusiclabs.com 7.7.14
example sketch for testing the fft library.
it takes in data on ADC0 (Analog0) and processes them
with the fft. the data is sent out over the serial
port at 115.2kb.
*/
#define LOG_OUT 1 // use the log output function
#define FFT_N 256 // set to 256 point fft
#include <FFT.h> // include the library
void setup() {
Serial.begin(115200); // use the serial port
TIMSK0 = 0; // turn off timer0 for lower jitter
ADCSRA = 0xe5; // set the adc to free running mode
ADMUX = 0x45; // use adc5
DIDR0 = 0x01; // turn off the digital input for adc0
}
void loop() {
while(1) { // reduces jitter
cli(); // UDRE interrupt slows this way down on arduino1.0
for (int i = 0 ; i < 512 ; i += 2) { // save 256 samples
while(!(ADCSRA & 0x10)); // wait for adc to be ready
ADCSRA = 0xf5; // restart adc
byte m = ADCL; // fetch adc data
byte j = ADCH;
int k = (j << 8) | m; // form into an int
k -= 0x0200; // form into a signed int
k <<= 6; // form into a 16b signed int
fft_input[i] = k; // put real data into even bins
fft_input[i+1] = 0; // set odd bins to 0
}
fft_window(); // window the data for better frequency response
fft_reorder(); // reorder the data before doing the fft
fft_run(); // process the data in the fft
fft_mag_log(); // take the output of the fft
sei();
//determine treasure detected
//from lab2 bins corresponding to relevant frequencies are
// 7 kHz = bin 46 12kHz = bin 78 17kHz = bin 114
// 7 kHz treasure detected
int max_bin = 0; //target bin value
int max_amp = 0; //max fft amplitude
//extract and sort fft data to find max amplitude and bin
for (byte i = 2 ; i < FFT_N/2 ; i++) {
if(fft_log_out[i] > max_amp){
max_amp = fft_log_out[i];
max_bin = i;
}
}
//detect treasure frequency by evaluating bin ranges
//7 khz
if((max_bin >= 45) && (max_bin <= 47)){
Serial.println("7 kHz Treasure detected");
}
//12 khz
else if((max_bin >= 79) && (max_bin <= 81)){
Serial.println("12 kHz Treasure detected");
}
//17 khz
else if((max_bin >= 113) && (max_bin <= 115)){
Serial.println("17 kHz Treasure detected");
}
//no treasure
else{
Serial.println("No Treasure detected");
}
}
}